
声全息检测,作为全息技术在超声波无损检测(NDT)领域的重要延伸,其核心思想与激光全息一脉相承。两者都根植于波动方程所描述的干涉与散射规律,本质上都是为了捕捉和重建波前信息。然而,声全息所面对的介质、波长以及记录与重建方法,都使其成为一个独特且充满挑战的工程领域。
这项技术通过向工件发射超声波,利用声透镜或声反射镜收集穿透或反射的散射波,在特定平面上形成声波图像。随后,传感器将这幅无形的声图转换为可见的光学图像。超声波具备穿透不透明物体的能力,这使得声全息能够精准探测工件内部的缺陷、非均质性以及其他微观组织结构的异常。
但一个固有的挑战随之而来:声波的波长远大于光波。这种从声学记录到光学显示的转换,不可避免地导致图像分辨力的下降。若要追求更高的分辨力,就必须采用接近光频率的超高频超声波,这又对设备和工艺提出了更高的要求。
| 项 目 | 内 容 |
|---|---|
| 基本原理 | 利用声波波前的相干特性,通过测量由工件内部非均质结构或缺陷引起的声波散射与吸收,来获取物体内部信息。 |
| 检测部位 | 工件的表面及内部结构。 |
| 核心优点 | 检测时无需对工件施加载荷;成像直观,信息丰富;人为判读的主观影响小;易于实现自动化检测;现代设备能够永久记录和显示结果。 |
| 主要局限 | 声-光图像转换过程限制了有效频率范围,从而影响分辨率;系统设备相对复杂,成本高昂,目前多在实验室环境中应用。 |
| 应用范围 | 尤其适用于薄壁材料或构件的内部质量评估。 |
目前,主流的声全息检测装置主要分为两大技术路径:一是光学模拟声全息,它借鉴光学全息的思路,使用特定的记录介质替代照相底片来捕捉超声波干涉图;二是扫查声全息,其原理更接近于合成孔径雷达,通过机械或电子扫查并借助计算机进行成像。
| 项 目 | 光学模拟声全息 | 扫查声全息 |
|---|---|---|
| 机理 | 模拟光学全息照相,利用对声波敏感的介质直接记录干涉图像。 | 模拟合成孔径雷达,通过探头在工件上方进行扫查,由计算机合成图像。 |
| 干涉形成 | 需要两个独立的换能器,分别产生承载物体信息的“物体声束”和作为基准的“参考声束”,两者干涉形成声全息图。 | 通过单个换能器将接收到的声信号转换为电信号,与内部参考信号进行电子相位比较,直接生成全息数据,无需物理上的参考声束。 |
| 图像获取 | 通常可提供实时或准实时的图像。 | 图像数据采集后需要计算机进行重建,非实时。 |
| 数据记录 | 若无特殊记录装置,图像是瞬时的,无法保存。 | 数据以数字形式存储,可提供永久性记录。 |
| 典型系统 | 液面声全息系统。 | 各类基于计算机成像的扫查系统。 |
光学模拟声全息是最早实现商业化的技术路径之一,其中以液面声全息法最具代表性。
液面声全息系统的基本构成包含声学系统与光学系统两大部分,如图1所示。
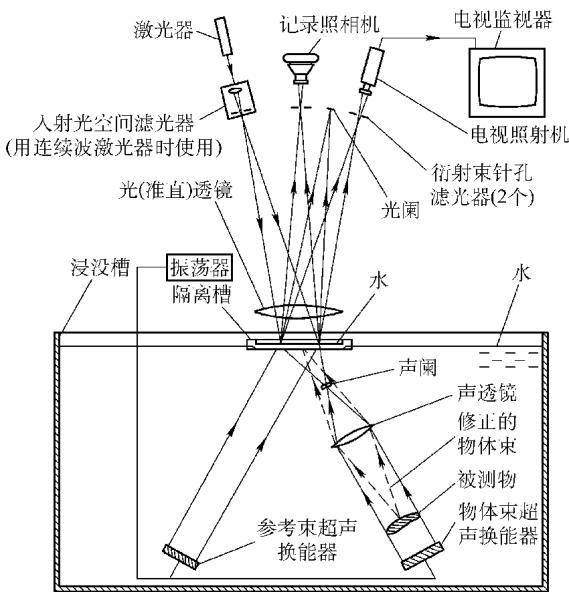
图1 液面声全息系统的基本形式
声学系统的核心是由同一振荡器激励的两个独立超声波换能器,它们与待测工件一同浸没在水槽中。一个换能器发射的声束穿过工件,携带其内部结构信息,形成“物体声束”;另一个则提供相位和幅度稳定的“参考声束”。两者通常采用脉冲工作方式。
| 作用与要求 | 物体声束换能器 | 参考声束换能器 |
|---|---|---|
| 作用 | 声束穿过被测件后,其幅度和相位发生改变,形成包含被测件信息的物体场声束。 | 声束不受被测件影响,作为干涉图像的稳定参考基准。 |
| 声波波前 | 波前形态复杂,包含了被测件的内部结构信息。 | 波前是与物体声束相干的第二波前。 |
| 要求 | 为一次性检测较大区域,发射的声束截面应具有足够大且均匀的声压。 | 为便于后续转换为光学图像,其波前应具有简单的几何形状,如平面波或球面波。 |
在工业应用中,物体声束的典型参数范围为:
为保证成像质量,声学系统的布置需遵循以下准则:
在工作模式上,脉冲超声波束相比连续波具有明显优势,如易于调节、可避免驻波干扰等。而在成像方式上,穿透式与反射式各有千秋,反射式成像质量更优但系统设计更复杂。
| 特 点 | 脉冲超声波束 | 连续波超声波束 |
|---|---|---|
| 参考声束时间调节 | 容易调节 | 调节费事 |
| 驻波干扰 | 可有效避免驻波 | 容易产生驻波,且隔离困难 |
| 换能器发射强度 | 需要发射能量强度较高的换能器 | 对换能器发射强度要求较低 |
| 特 性 | 脉冲反射方式 | 穿透方式 |
|---|---|---|
| 声径设计与实施 | 物体声束的声路设计与实现较为复杂。 | 物体声束的声路设计与实现相对简易。 |
| 成像质量 | 成像质量较好,深度分辨力高。 | 成像质量较差,深度分辨力低。 |
| 换能器要求 | 需要高声能强度和高质量的物体声束换能器。 | 可应用普通的物体声束换能器。 |
液面声全息的巧妙之处在于,液面涟波形成的全息图可直接作为一种动态的衍射光栅。当相干的激光束照射到这片涟波上时,会发生衍射。通过观察特定衍射级次的光,即可实时重建出超声波图像。
光学系统的布置同样有严格要求:
声全息图像的重建使用了波长极短的相干光(λ)来观测由波长长得多的声波(λs)形成的全息图。为了有效衍射光波,全息图的尺寸通常会被光学系统缩小m倍。
这种巨大的波长差异(通常λs/λ > 300)是图像畸变和深度失真的根源。
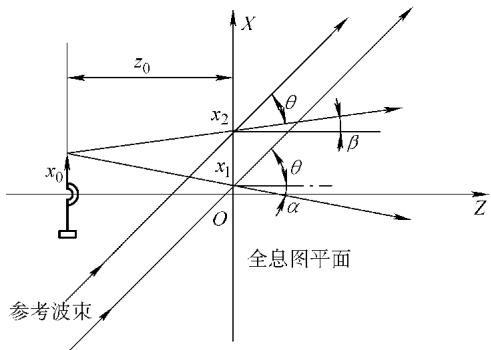
图2 利用平面参考波束形成全息图的原理
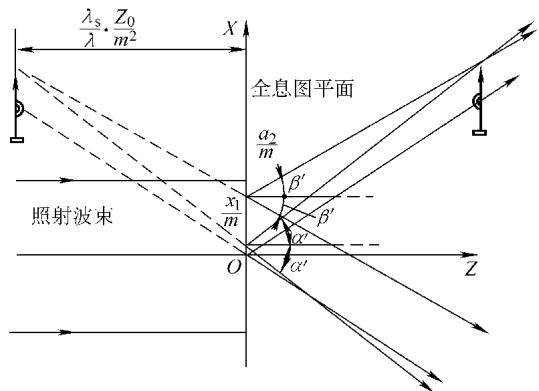
图3 平面照射声束全息图的成像原理
从物理过程来看(如图2和图3所示),全息图记录了物体波和参考波的干涉信息。当用光波再现时,会同时产生两个像:一个是与原始目标相似的虚像,另一个是共轭的实像(凸出部位变为凹陷,即“幻视”现象)。
重建图像的角度关系(α’)与原始声波角度(α)之间的关系可以用下式描述: sin α’ = (mλ/λs)sin α + (mλ/λs)sin θ 其中θ是参考波的入射角。
只有在小角度近似(α ≈ sin α)且满足特定条件时,畸变才能被忽略。在实际应用中(m值约为4-12,声波入射角小于30°),横向畸变通常可以接受。然而,图像在深度方向上会被拉伸,产生所谓的“深度失真”,其失真系数约为λs/(mλ)。为了最小化畸变和失真,在不影响观察的前提下,全息图缩得越小越好。但如果后续用光学系统放大图像,深度失真会再次被放大。
液面声全息系统一次能够成像的区域受限于换能器和声透镜的尺寸(典型最大直径约152 mm)。对于大型工件,必须分段移动工件进行扫查成像。
| 项 目 | 检测性能 |
|---|---|
| 被检工件尺寸和形状 | 最适于薄壁件,尤其是条、带状产品的连续检测。 |
| 检测速度 | 实时检测。工件能以较高速度(如5-30 cm/s)移过物面,实现高速检测(见图4)。 |
| 成像清晰度 | 通常工作在与电视帧率兼容的脉冲频率下(如60帧/秒),可获得无闪烁的实时图像。 |
| 照相速度 | 可以1/60秒的快门速度拍摄运动物体的全息图。 |
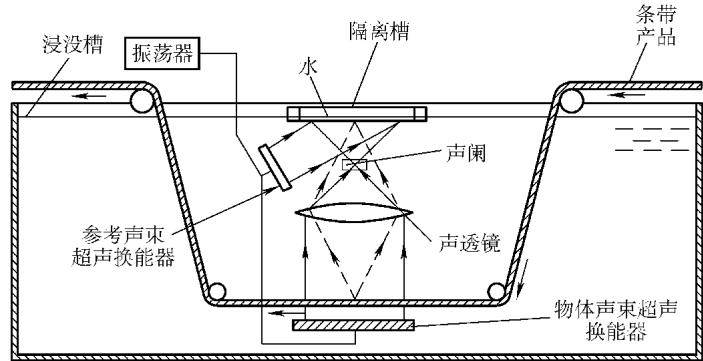
图4 检测条带产品的液面声全息系统声学部分简图
灵敏度与分辨力: 系统的灵敏度取决于液面涟波的稳定性,典型系统可探测的最小声强约为10 ~ 10-2 W/m2。 横向分辨力(Δx)和深度分辨力(Δz)可由以下公式确定: Δx = 1.22λs / (f / a) Δz = 2λs / (f / a)2 其中,λs是声波波长,f是声透镜焦距,a是声透镜孔径。例如,使用f/3透镜和5 MHz频率检测钢或铝时,横向分辨力约1 mm,深度分辨力约5 mm。
工业装置: 工业用液面声全息系统(图5)通常设计有独立的工件水槽和转换水槽,通过声窗连接,以提高抗振稳定性。这类设备体积和重量较大(如重约450 kg),基本为固定式安装(图6)。
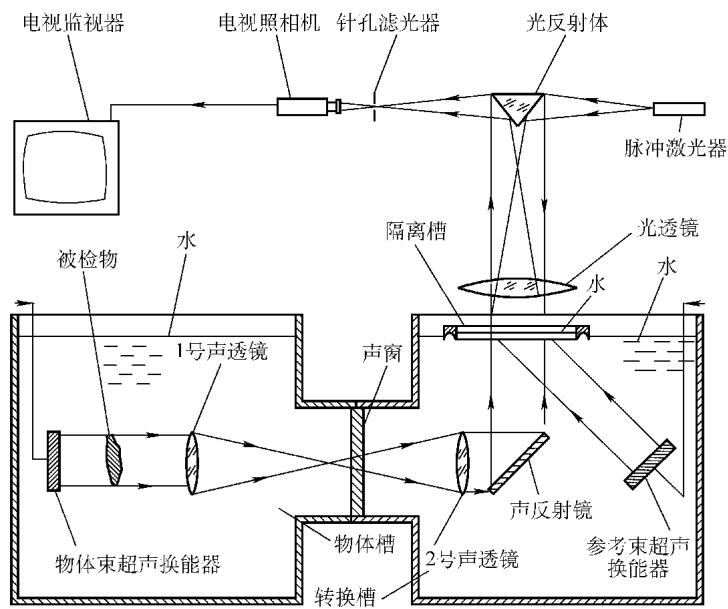
图5 工业用液面声全息系统简图
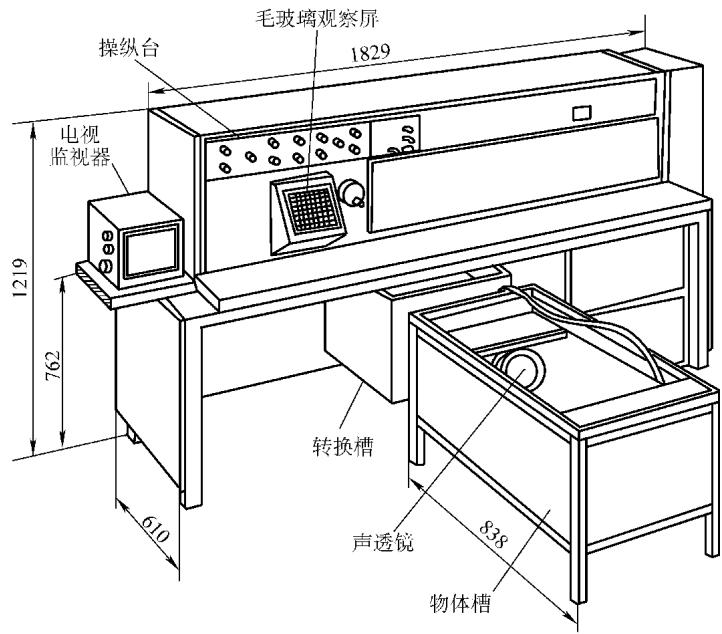
图6 检测小型金属件的工业用液面全息装置
针对特定需求,也开发了专用设备,如用于连续检测金属带材的系统(图7、图8),通过进出口水封设计实现带材的连续移动。
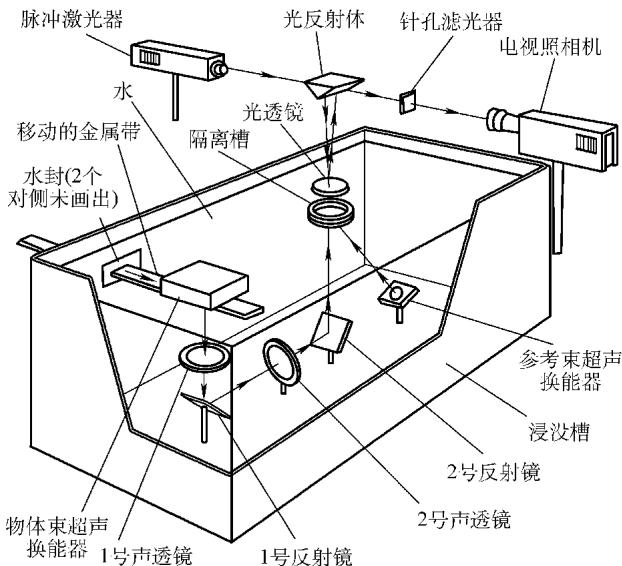
图7 检测连续移动金属带的液面声全息装置声光系统简图
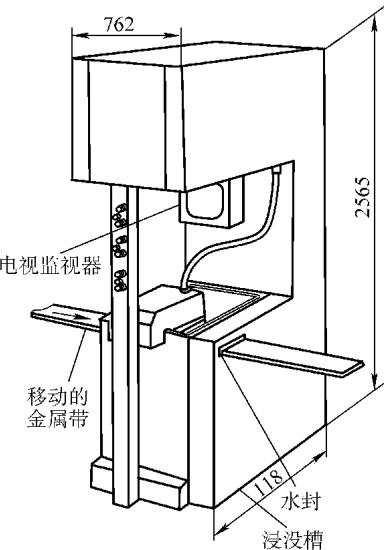
图8 检测连续移动金属带的工业用液面声全息装置
| 特 征 | 适用范围 | 最佳条件 |
|---|---|---|
| 声波频率/MHz | 3、5、7或9,已成功扩展到50 | 3或5 |
| 脉冲持续时间/μs | 100-300 | 100 |
| 脉冲重复频率/Hz | 60-100 | 60 |
| 声成像频率(帧)/Hz | 60-100 | 60 |
下表为液面声全息在25%水中某些参数的计算实例。
| 项 目 | 参量及算式 | 数 值 |
|---|---|---|
| 液体的性质 | 密度ρ | 1×10³ kg/m³ |
| 表面张力γ | 7.2×10⁻² N/m | |
| 粘滞系数ηv | 9×10⁻³ Pa·s | |
| 声速c | 1.5×10³ m/s | |
| 操作参数 | 入射角θ | 5° |
| 声频fS | 10⁷ Hz | |
| 声强度Ia | 10 W/m² | |
| 常数或算式 | 重力加速度g | 9.8 m/s² |
| 水面的有效垂直位移量h, h=2Ia/cg | 1.36×10⁻⁴ m | |
| η=2π/λs sinθ | 3.65×10³ m⁻¹ | |
| 计算与结果 | d1=2η/ρηv=24s⁻¹ t1=1/d1=4.2×10⁻²s | |
| d2=[4η(ργ-hηv²η²)+ρ²g]1/ρ²h=5.3×10³s⁻¹ t2=1/d2=1.9×10⁻⁴s | ||
| d3=(g/h)¹/²=2.7×10²s⁻¹ t3=1/d3=3.7×10⁻²s | ||
| d4=γ/ηv h=5.9×10⁵s⁻¹ t4=1/d4=1.7×10⁻⁶s | ||
| t1=1/d1为使振荡阻尼到原始的1/e的时间=0.042s | ||
| fT=2/2π为纹波振荡频率=844Hz | ||
| fB=2/2π为液面隆起的振荡频率=43Hz | ||
除了液面法,研究人员还开发了其他几种利用光学原理进行模拟的声全息装置。
| 系统名称 | 基本原理 | 特点 |
|---|---|---|
| Metherell系统 | 以柔性固体薄膜代替液体表面,采用亚条纹干涉测量法,并用相位调制的光束代替物理参考声束。 | 图像质量与液面法相当,易于实现实时显示,并可永久记录。 |
| Whitman系统 | 界面为镀金的介电薄膜,用窄激光束扫查薄膜,通过光电探测器检测其振动幅度,同步调制监视器显示声图像。 | 通过巧妙的光学设计解决了大孔径成像问题,成像质量有所提升,但成本较高。 |
| Welf和Young系统 | 与液面法类似,但改用薄油层或热塑性塑料作为界面,利用电场技术使其在不稳定条件下形成放大的声图形。 | 灵敏度较高,可永久记录。 |
| 溶液 | 偶极距/粘滞系数(比值) | 响应时间/s |
|---|---|---|
| 乙腈 | 9.8 | 3 |
| 丙酮 | 9.1 | 4 |
| 甲醇 | 2.9 | 6 |
| 肥皂水 | 1.8 | 6 |
| 乙醇 | 1.4 | 8 |
| 名 称 | 结 构 特 点 | 性 能 |
|---|---|---|
| Marom等的装置 | 采用市售摄像管,但高分辨率要求与有限的声敏面尺寸之间存在矛盾。 | 实时显示,灵敏度可达10⁻⁴W/m²,但有效图像范围有限。 |
| Mueller等的装置 | 采用电子模拟参考代替声学参考,有所改进,但分辨率与孔径的矛盾依然存在。 | 参考束有改进,但核心矛盾未解决。 |
| Brown等的装置 | 采用EMI新型管,将换能器安装在增强的塑料面板上,增大了有效成像面积。 | 解决了分辨率与孔径的矛盾,有效孔径可达150mm×210mm,灵敏度高。 |
| Grutte等的装置 | 用LED阵列代替真空管,消除了对面板有效面积的限制。 | 实时显示,但目前灵敏度尚较低。 |
| Sabet和Tarner的装置 | 研制了光扫查参量图像变换器,将压电陶瓷夹在金属板和光导硅薄膜之间。 | 实时显示,消除了对面板面积的限制。 |
| Jacobs和Peterson的装置 | 在晶体面板上安装半球单元以增加接收角,从而在有限面板尺寸下增加孔径。 | 最适于声全息应用,但仅限于穿透成像。 |
扫查声全息是该领域的一项重大革新,它将全息图的生成从物理干涉转向了电子处理和计算机重建。
其基本构成如图9所示,系统核心是采用电子相位检测技术来生成全息图,因此不再需要物理上的参考声束换能器。
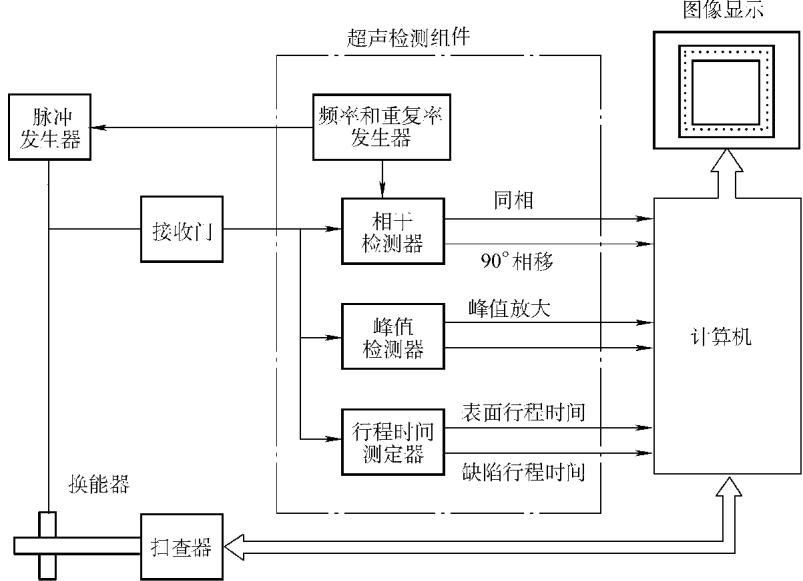
图9 一种集成了A/B/C扫描和扫查声全息功能的工业检测系统框图
工作流程如下:
这种方法有两大优势:
系统通常使用脉冲信号,并利用时间门技术来选通特定深度的回波,有效抑制杂波。工业装置的典型参数为:频率1-10 MHz,脉冲持续时间5-20 μs,脉冲重复频率500-1000 Hz。
| 名称 | 特点 |
|---|---|
| 平面笛卡儿扫查 | 最常用的扫查方式,探头做X-Y栅格运动。可采用短脉冲,灵敏度和分辨率高。缺点是每行扫查结束时需要机械换向,影响速度。 |
| 螺旋扫查 | 为避免机械换向,探头沿螺旋线运动。缺点是模拟相应偏移的电子参考信号较为复杂。 |
| 平移圆扫查 | 探头走圆形轨迹,同时圆心沿直线移动。同样是为了避免换向,但缺点与螺旋扫查类似。 |
| 复合扫查 | 使用换能器阵列代替单个探头,通过电子切换代替部分或全部机械运动,可大幅提高扫查速度。 |
扫查声全息记录的是数字全息图,需要通过重建装置将其转换为可见图像。
| 装置名称 | 原 理 | 特 点 |
|---|---|---|
| 照相底片法 | 将数字全息图显示在屏幕上,用相机拍摄。 | 方法简单经济,但非实时,需要显影过程。 |
| 透光软片即时显影法 | 使用如宝丽来(Polaroid)公司的即时显影相纸。 | 免去了暗室显影工序,但仍非数字重建。 |
| 化学纸记录器 | 将全息图直接打印在化学记录纸上。 | 可在明亮环境下操作,但无法满足多通道记录需求。 |
| KDP调制器 | 利用电光晶体(如KDP)的折射率随电场变化的特性,将全息图电信号转换为光的相位调制。 | 一种早期的电光转换方法,灵敏度和分辨率有限。 |
| EMI摄像管 | 利用特制的摄像管作为空间光调制器。 | 性能较好,但记录非完全实时,有写入和擦除时间。 |
| Ferpic系统 | 一种集成的铁电-光导调制器,利用光学方式存储全息图。 | 分辨率很高,但记录灵敏度低。 |
| 数字重建(主流) | 将存储的数字全息图通过傅里叶变换等算法在计算机中直接计算出再现像。 | 当今主流方法。 灵活、快速、可进行各种后处理,完全消除了物理重建装置的限制。 |
重建图像中缺陷的尺寸(M)和深度(R)与系统参数的关系可通过以下公式计算: R = m₁²(λs/λ) · [D(f - d)] / [D - (f - d)] M = (m₂/m₁) · (λ/λs) · (D/R) 其中,m₁是扫查长度与全息图长度之比,m₂是电子放大倍数,λs和λ分别是声波和光波的波长,D、f、d是光学系统参数。在纯数字重建中,这些关系被算法内化。
为便于现场使用,工业级扫查声全息设备通常是模块化的,包括扫查器、超声波单元和专用计算机(图10)。耦合方式也更灵活,除了传统水浸,还可以使用喷水水柱,方便对大型或异形工件(如机翼)进行检测。
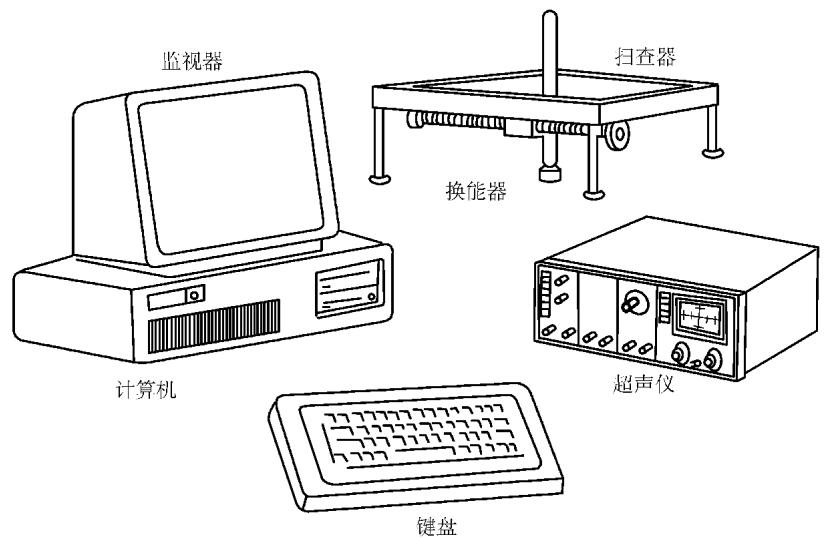
图10 商品化扫查声全息系统的主要部件
现代扫查器多为数控,可进行精确的栅格扫查,扫查步距可调(如0.15 mm至0.91 mm),单次可记录面积可达105 mm × 105 mm。
这两种主流技术路径各有侧重,适用于不同的检测场景。
| 特征 | 液面声全息 | 扫查声全息 |
|---|---|---|
| 检测方式 | 通常为穿透方式,需接触工件两面,不利于确定缺陷深度。 | 多用反射方式,只需接触工件单面,能精确确定缺陷深度和大小,并可绘制表面轮廓。 |
| 检测速度 | 实时成像,适合对大量材料进行快速、连续的在线检测。 | 图像需要采集和重建,速度较慢,更适合离线、精细分析。 |
| 分辨力与灵敏度 | 典型分辨力:横向1mm,纵向5mm。灵敏度约10 ~ 10⁻² W/m²。 | 分辨力与液面法相当或更优(取决于合成孔径大小)。灵敏度极高,可达10⁻⁸ W/m²。 |
| 设备形态 | 通常为大型固定式设备。 | 设备可设计为移动式,便于现场应用。 |
| 耦合系统 | 工件需完全浸没在水中。 | 可通过水柱或局部水耦合,对大型工件适应性好。 |
| 波形选择 | 限于直射声束,通常只产生和利用纵波。 | 通过调节声束入射角,可灵活选择使用纵波或横波进行检测。 |
| 永久性记录 | 需外接照相或磁带记录设备。 | 本身即为数字记录,可永久保存和追溯。 |
下表汇总了各种声全息检测方法的关键性能指标。
| 检测方法 | 灵敏度/(W/m²) | 分辨力 | 成像时间 | |
|---|---|---|---|---|
| 超声波摄像装置 | 石英换能器 | 10⁻³ | 3λw① | 10T② |
| 钛酸钡换能器 | 10⁻⁵ | 2λw | 10T | |
| 锆钛酸铅换能器 | 10⁻⁷ | 2λw | 10T | |
| 液面声全息 | 10 | λw | 10T (实时) | |
| 粒子室 | 10⁻³ | λw | >1s | |
| 单探头扫查 | 10⁻⁸ (最高) | λw | >30s | |
| 换能器阵列 | 10⁻⁸ | λw | 10T (实时) | |
| 照相底片法 | 显影时照射 | 500 | 1mm | >30s |
| 定影时照射 | 10⁴ | 1mm | >30s | |
| 在碘溶液中的淀粉板 | 5×10³ | 1mm | >30s | |
从性能对比中可以看出,不同的声全息技术在灵敏度、实时性和系统复杂度上存在巨大差异。要获得一幅信噪比高、结果可靠的全息图像,对检测方案设计、设备参数配置和操作人员的专业能力都有极高要求。这正是专业检测实验室的核心价值所在。 精工博研测试技术(河南)有限公司(原郑州三磨所国家磨料磨具质量检验检测中心),央企,国字头检测机构,专业的权威第三方检测机构,专业检测复合材料、金属构件等内部缺陷,可靠准确。欢迎沟通交流,电话19939716636
尽管声全息装置相对复杂且成本较高,但其提供的高信息密度和直观成像能力,使其在许多关键领域具有不可替代的优势。其应用场景主要集中在三个方面:
| 检测对象 | 检测设备与方法 | 检测结果与评价 |
|---|---|---|
| 石墨/纤维复合材料粘接件、铝/铝胶接件、铝/石墨纤维蜂窝芯结构 | 液面声全息装置,配合专用扫查机构。 | 能有效检出气孔、夹杂、脱粘、裂纹、富/贫脂区、纤维损伤、芯子压碎等多种缺陷。操作简便,检测速度快,成像质量好。 |
| 石墨/硼-环氧复合材料、玻璃纤维板、各类蜂窝结构 | 液面声全息装置。 | 能检出大部分常见缺陷。但存在孔径限制、水浸界面反射干扰等问题,对网格状等复杂外形构件成像困难。 |
| 薄材料定位焊(如两层4mm铝板) | 检测连续移动金属带的液面装置,频率3MHz。 | 合格焊点呈现界限清晰的亮点,与缺陷焊点区别明显。 |
| 薄材料焊缝(如1.6mm厚钛板) | 同上,频率5MHz。 | 能清晰区分存在气孔的暗区和无缺陷的亮区。 |
| 铅铝合金/钢基结合体 | 检测连续移动金属带的液面装置。 | 直径小于1.6mm的未熔合区可在监视器上清晰显示。 |
随着计算能力的飞速发展和换能器技术的不断进步,特别是高速换能器阵列和先进数字重建算法的成熟,声全息技术正逐步从实验室走向更广阔的工业现场,有望在高端制造、材料科学和结构健康监测等领域扮演越来越重要的角色。









 首页
首页
 检测领域
检测领域
 服务项目
服务项目
 咨询报价
咨询报价
